Robotics
Underwater robot can detect contraband hidden under ships

Overseas contraband has been a big issue in international affairs for a long time now, with governments trying to weed out the illegal transportation of tobacco, alcohol and drugs, without any luck. Contraband is one of the day-to-day occurrences that is as hard to stop as theft or embezzlement. MIT researchers have come up with an underwater robot that can detect contraband attached to the bottoms of the ships that carry them, making a real advancement in the prevention of contraband.
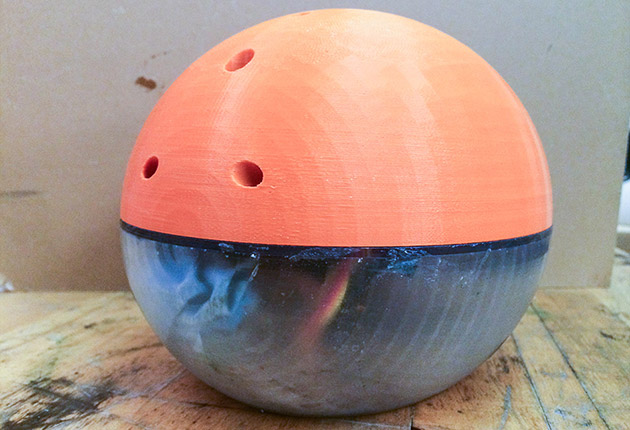
The bottom part of the underwater robot houses the electronics, while the top part houses the propulsion system.
Contraband is not only a threat to a country’s economy, but it is a threat to consumers as well, since all contraband material will not come with guarantees, warranties or any certainty that the product is safe whatsoever. That is why MIT researchers have started working on the underwater robot that will help law enforcement and customs agents detect illegal cargo on ships without being noticed by the perpetrators. With the use of an underwater robot, there could be many costs and risks minimized for government agencies and law enforcement as well.
The underwater robot was created with the purposes of keeping ports safe and making customs checks easier on officers, as well as undetectable. The robot is about the size of a football, and it has the ability to swim around a ship or a boat and detect hollow spaces where contraband could be hidden. The underwater robot uses ultrasound scans to collect data and it was originally designed to detect cracks in nuclear reactor water tanks. The underwater robot has an oval shape with a flat panel on the side used as the scanning device. Although the underwater robot is pretty obtrusive and would stick out in an average ocean environment, MIT researchers say that the mechanism it uses leaves no wakes or ripples behind it and its shape allows for easy camouflage in algae or marine plants.
The insides of the underwater robot.
The underwater robot seems to be rather easy to make and will not cost a fortune like other robots do, with a price tag of around $600. The robot can be 3D printed and the device consists of a waterproof part which houses the electronics and does the actual scanning, whilst the other part is permeable and houses the propulsion system which pumps water in order for the robot to move around. The low price tag and easy manufacturing would make the underwater robot a good investment for port security because it could be sent out in swarms to sweep the ships coming without them even noticing their presence. The robots could do a collaborative inspection and send the data to the ports without the risk of being caught red-handed.
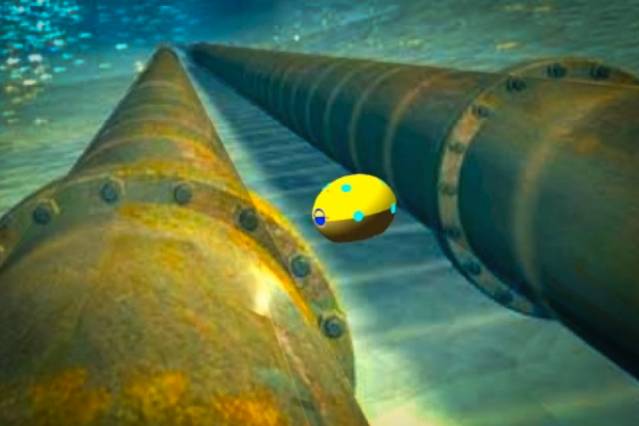
This is how the underwater robot will look like when scanning objects.
The battery in the underwater robot lasts for about 40 minutes and the robot can travel about a meter each second, so the time it has available lets it scan at least three smaller ships. If the underwater robot can be sent out in swarms, with groups of robots doing the inspections in the port while other groups sit back at the port, recharging, the 40 minute battery life should not be a problem. At least not for now, since the robots are still in development. They will probably be capable of wireless charging when the prototypes will be finished and will be able to perform ultrasounds without making surface contact with the object they are scanning (usually necessary for an ultrasound).
The underwater robot is not yet finalized, but if the technology MIT researchers use will allow it, the robot can become quite handy over time. The robots could detect structural defects, nuclear weapons, firearms or even check radiation levels. You can even imagine these robots routing traffic around in ports by communicating with each ship in the port and with all the underwater robot units assigned to their areas. It’s an interesting prototype and it will surely bring a lot of innovation into port security protocols.
A lot of people have tried out chatbots like ChatGPT in the past few months. Although they can be useful, there are also many examples of them giving out the wrong information. A group of scientists from the University of Oxford now want to know if there is a legal way to make these chatbots tell us the truth.
The growth of big language models
There is a lot of talk about artificial intelligence (AI), which has grown to new heights in the last few years. One part of AI has gotten more attention than any other, at least from people who aren’t experts in machine learning. It’s the big language models (LLMs) that use generative AI to make answers to almost any question sound eerily like they came from a person.
Models like those in ChatGPT and Google’s Gemini are trained on huge amounts of data, which brings up a lot of privacy and intellectual property issues. This is what lets them understand natural language questions and come up with answers that make sense and are relevant. When you use a search engine, you have to learn syntax. But with this, you don’t have to. In theory, all you have to do is ask a question like you would normally.
There’s no doubt that they have impressive skills, and they sound sure of their answers. One small problem is that these chatbots often sound very sure of themselves when they’re completely wrong. Which could be fine if people would just remember not to believe everything they say.
The authors of the new paper say, “While problems arising from our tendency to anthropomorphize machines are well established, our vulnerability to treating LLMs as human-like truth tellers is uniquely worrying.” This is something that anyone who has ever had a fight with Alexa or Siri will know all too well.
“LLMs aren’t meant to tell the truth in a fundamental way.”
It’s simple to type a question into ChatGPT and think that it is “thinking” about the answer like a person would. It looks like that, but that’s not how these models work in real life.
Do not trust everything you read.
They say that LLMs “are text-generation engines designed to guess which string of words will come next in a piece of text.” One of the ways that the models are judged during development is by how truthful their answers are. The authors say that people can too often oversimplify, be biased, or just make stuff up when they are trying to give the most “helpful” answer.
It’s not the first time that people have said something like this. In fact, one paper went so far as to call the models “bullshitters.” In 2023, Professor Robin Emsley, editor of the journal Schizophrenia, wrote about his experience with ChatGPT. He said, “What I experienced were fabrications and falsifications.” The chatbot came up with citations for academic papers that didn’t exist and for a number of papers that had nothing to do with the question. Other people have said the same thing.
What’s important is that they do well with questions that have a clear, factual answer that has been used a lot in their training data. They are only as good as the data they are taught. And unless you’re ready to carefully fact-check any answer you get from an LLM, it can be hard to tell how accurate the information is, since many of them don’t give links to their sources or any other sign of confidence.
“Unlike human speakers, LLMs do not have any internal notions of expertise or confidence. Instead, they are always “doing their best” to be helpful and convincingly answer the question,” the Oxford team writes.
They were especially worried about what they call “careless speech” and the harm that could come from LLMs sharing these kinds of responses in real-life conversations. What this made them think about is whether LLM providers could be legally required to make sure that their models are telling the truth.
In what ways did the new study end?
The authors looked at current European Union (EU) laws and found that there aren’t many clear situations where an organization or person has to tell the truth. There are a few, but they only apply to certain institutions or sectors and not often to the private sector. Most of the rules that are already in place were not made with LLMs in mind because they use fairly new technology.
Thus, the writers suggest a new plan: “making it a legal duty to cut down on careless speech among providers of both narrow- and general-purpose LLMs.”
“Who decides what is true?” is a natural question. The authors answer this by saying that the goal is not to force LLMs to take a certain path, but to require “plurality and representativeness of sources.” There is a lot of disagreement among the authors about how much “helpfulness” should weigh against “truthfulness.” It’s not easy, but it might be possible.
To be clear, we haven’t asked ChatGPT these questions, so there aren’t any easy answers. However, as this technology develops, developers will have to deal with them. For now, when you’re working with an LLM, it might be helpful to remember this sobering quote from the authors: “They are designed to take part in natural language conversations with people and give answers that are convincing and feel helpful, no matter what the truth is.”
The study was written up in the Royal Society Open Science journal.
On top of a British Army combat vehicle, the UK government fired what it calls a “speed of light laser weapon” in a test run.
The Land Laser Directed Energy Weapon (LDEW) Demonstrator program of the UK Ministry of Defense produced the weapon. It has now been tested at a firing range in Porton Down, Salisbury. The Ministry of Defense says the “ground-breaking” test went well, and the laser was able to destroy targets more than a kilometer (0.6 miles) away.
A “speed of light laser weapon” was used in the press release for the new test, which led to some confusing headlines.
https://twitter.com/GrampsToolshed/status/1815863904196542816?ref_src=twsrc%5Etfw%7Ctwcamp%5Etweetembed%7Ctwterm%5E1815863904196542816%7Ctwgr%5Edd1d335d3045427cc34f21557b4e642a2d2026be%7Ctwcon%5Es1_&ref_url=https%3A%2F%2Fwww.iflscience.com%2Fbritish-army-shows-off-new-speed-of-light-laser-weapon-75249
All lasers move at the speed of light, which is also the speed that all massless particles must move. This may sound impressive to people who fell asleep in physics class. If you want to sell water, you shouldn’t say “very wet” in the ads.
Still, the laser is impressive if you like shooting down enemy drones. This weapon’s best features are that it is small and light, which lets it be used for the first time on land vehicles.
The successful testing of this powerful laser weapon is a major step forward in our efforts to improve the British Army’s future operational capabilities, according to a press release from Matt Cork, who is in charge of the Defence Science and Technology Laboratory. “This technology offers a precise, powerful and cost effective means to defeat aerial threats, ensuring greater protection for our forces.”
Army members will test the “light speed laser weapon”‘s abilities and benefits in “real-world scenarios” later this year.
Engineering
To make up for a lack of workers, Japan’s railways now have huge humanoid robots doing work
JR West is going to fix its railway system in a very Japanese way: by using high-tech robots that look like people.
Starting this month, the company will use big robots that look like Mecha to do a lot of maintenance work on its railway infrastructure. For example, they will paint the support structures above the tracks and cut down tree branches that get in the way of the trains.
The flexible arms can reach heights of up to 12 meters (39 feet) and lift things that weigh up to 40 kilograms (88 pounds). They can also be fitted with different tools to do a wide range of odd jobs.
A person can sit in the truck that goes with the working mechanoid and use a joystick and VR goggles connected to a camera on the bot’s head to control its movement.
Below is a video that shows how the technology works. In one part of the montage, the robot is even seen using a circular saw to cut down tall trees. But don’t worry—the people who made the machine think it’s a safe pair of hands.
JR West recently said that they worked with robotics company Jinki Ittai and tech company Nippon Signal to create the technology. They did this to make their employees safer and lower the risk of accidents at work.
They also said that “labor shortages” were a big reason for the new technology. Japan has one of the oldest populations in the world. About 29% of the people there are over 65 years old. It will be a problem for a lot of people, including the economy, which is already having a hard time because of a lack of workers.
Robots and other new technologies are often blamed for “stealing jobs” from people, but it looks like they can also be used to fill in for workers who aren’t available.
- Gadgets10 years ago
Why the Nexus 7 is still a good tablet in 2015
- Mobile Devices10 years ago
Samsung Galaxy Note 4 vs Galaxy Note 5: is there room for improvement?
- Editorials10 years ago
Samsung Galaxy Note 4 – How bad updates prevent people from enjoying their phones
- Mobile Devices10 years ago
Nexus 5 2015 and Android M born to be together
- Gaming10 years ago
New Teaser For Five Nights At Freddy’s 4
- Mobile Devices10 years ago
Google not releasing Android M to Nexus 7
- Gadgets10 years ago
Moto G Android 5.0.2 Lollipop still has a memory leak bug
- Mobile Devices10 years ago
Nexus 7 2015: Huawei and Google changing the game